This was originally posted to Catalyst PR’s Facebook page and is reproduced here to make it accessible to people who don’t have Facebook accounts.
For information on the presentations at Dyalog ’14, see http://www.dyalog.com/user-meetings/dyalog14.htm.
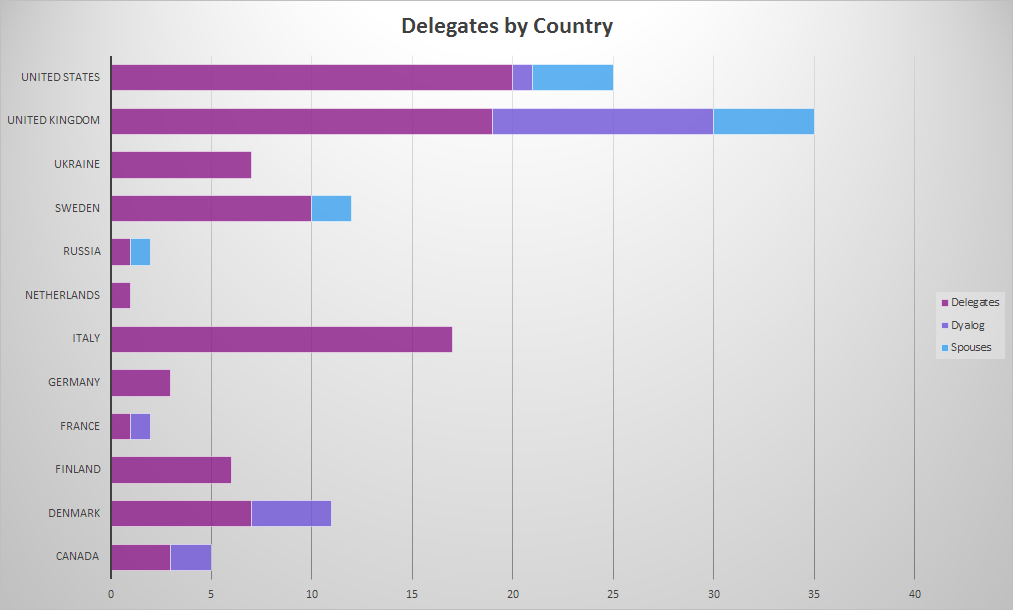
After having spent yesterday in workshops with lots of hands-on examples, today was the kick off for the user meeting proper. The last time Dyalog held a global user meeting in the UK was in 2003, and 2014 has given us an all-time record attendance in terms of delegates.
DNA
My posts from Dyalog ’14 will focus on extracts from User Presentations, and the first presentation I would like to highlight is There’s DNA Everywhere – an Opportunity for APL by Charles Brenner PhD (http://dna-view.com).
Charles Brenner
Charles describes himself as consulting in forensic mathematics and his DNA-View software programme is used by 100 laboratories in every continent (except Antarctica) for academic activities in mathematics, biostatistics and various aspects of population genetics.
Charles used the example of gun crime to illustrate: “Use a gun in a crime and, thanks to recent biochemical advances, you’ll likely leave enough DNA to be detected. However, often the gun has also been handled by others and, consequently, the analysis of DNA mixtures has become increasingly important. The market for good DNA mixture software, therefore, has led me to recent and rapid progress in my long-delayed venture to convert my forensic DNA interpretation work into the modern world of Dyalog. Many people enjoy the scientific aspects of the story and I enjoy relating how, in my view, this project exemplifies the thesis that APL is a tool of thought. I credit APL with leading me to elegant and, therefore, very fast and flexible solutions to a problem for which the competing solutions are lumbered by complicated statistical and Monte Carlo methods.”
Elegance and simplicity lead to several concrete benefits. The first is conceptual development.
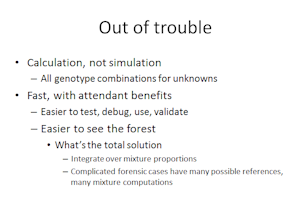
Slide from talk I01
“I made notes in APL as solutions to various aspects of the problem occurred to me last year. These brief APL notes ensured that the ideas really made sense, that they worked together and that I would not forget them. The brevity also revealed a simple but important point that others had overlooked: nesting the computation loops in the right order saves orders of magnitude in computation time. For another, execution speed makes it much easier to see the forest in many ways – testing, developing, designing. Competing programs take hours to find a partial answer, then having worked that hard succumb to a natural tendency to call it a day. The APL “DNA-VIEW Mixture Solution” program does the same in seconds, which makes it much easier to think through to the fact that there’s a lot more work to do before the result is logically defensible.” Charles explained.
At the end of 2013 Charles implemented the Mixture Solution and tested it on examples including a set of five proficiency exercises created at the National Institute of Standards and Technology. More than one hundred entrants, including the leading competition, had contributed analyses. One of the competitors (supported by years and millions of dollars of government grants) got four problems right and came close on the fifth, viewing it as a three person mixture although in fact it was four. Mixture Solution alone correctly analysed all five – as a bonus it correctly diagnosed one suspect as a mixed race person.
“We APLers try to be modest but it’s not always easy. Sometimes there’s just not much to be modest about!” Charles stated.
Having now reached a point where he has developed a superior, fast, elegant software solution to a massively complex DNA Mixture analysis problem, Charles ended the presentation with a plea for help. First and foremost he is looking for someone who can help carry on with the further software development using Dyalog. This could be a fantastic opportunity for someone with an interest in forensics, maths, computer science and software programming in Dyalog – “living in the Bay area”.
ELSI
The Finnish Pension System is currently undergoing a reform and there is a strong need to microsimulate various parameters to help make decisions regarding future pension schemes.
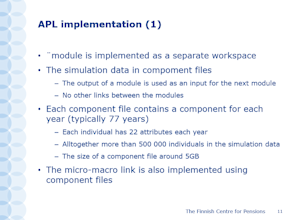
Slide from Talk U02
Heikki Tikanmäki from the Finnish Centre for Pensions gave us a presentation of ELSI – the Pension microsimulation model that has been built in the Finnish Centre for Pensions using Dyalog.
ELSI models the statutory pension system of Finland. It is used for reform analysis and long-term projections. In a typical simulation run, they model 500,000 individuals over 70 years.
By using Dyalog not only do they retain compatibility with older macromodels, population and employment projections, they also gain flexibility for modelling various proposals for a new pension scheme.
The model is built in modules with each module running as independently as possible. All the simulation data are held in component files. Depending on the complexity of each module, it takes 10-40 minutes to run using version 12.1 – without doing any performance optimisation.
Heikki told us that by upgrading to Dyalog version 14.0 the model runs 20% faster and the simulation data are now only taking up 16% space in comparison to the 5 GB size they previously had.
Future plans include implementing the use of parallel processors for the computational tasks in ELSI, and at that point in time he expects at least a further 50% reduction in the time it takes to run the entire microsimulation model.
 Follow
Follow