The view from the Sauna. Some people actually went in!
Finns probably have better reasons to look forward to spring more than most of us: not only does it get much easier to keep that hole in the ice open, it is time for the annual FinnAPL Forest Seminar!
This year, just under 20 of us gathered for two days (Thursday March 10th and Friday March 11th) at Hirvihaara Manor, about an hour north of Helsinki, to update each other on what we have been getting up to recently.
Thursday
After a warm welcome from Jouko Kangasniemi, Chairman of FinnAPL, Veli-Matti Jantunen from Statistics Finland kicked the proceedings off with a talk titled “The long way of an APL2 bigot to Dyalog world”, where he discussed features of recent versions of Dyalog APL, awarding some of them them varying numbers of thumbs up, declaring some to be irrelevant. A few were found to be flawed… We are hoping to talk him into a repeat at Dyalog’16 as this was a valuable and thought-provoking review!
I was on next – with the Spring 2016 version of the Dyalog Road Map. As should be confirmed by the slides, there is not a big change in direction. We are planning to increase headcount by another 10% this year and continue investing in the core interpreter technology, APL compilers, and tools to help you build applications on a growing number of platforms.

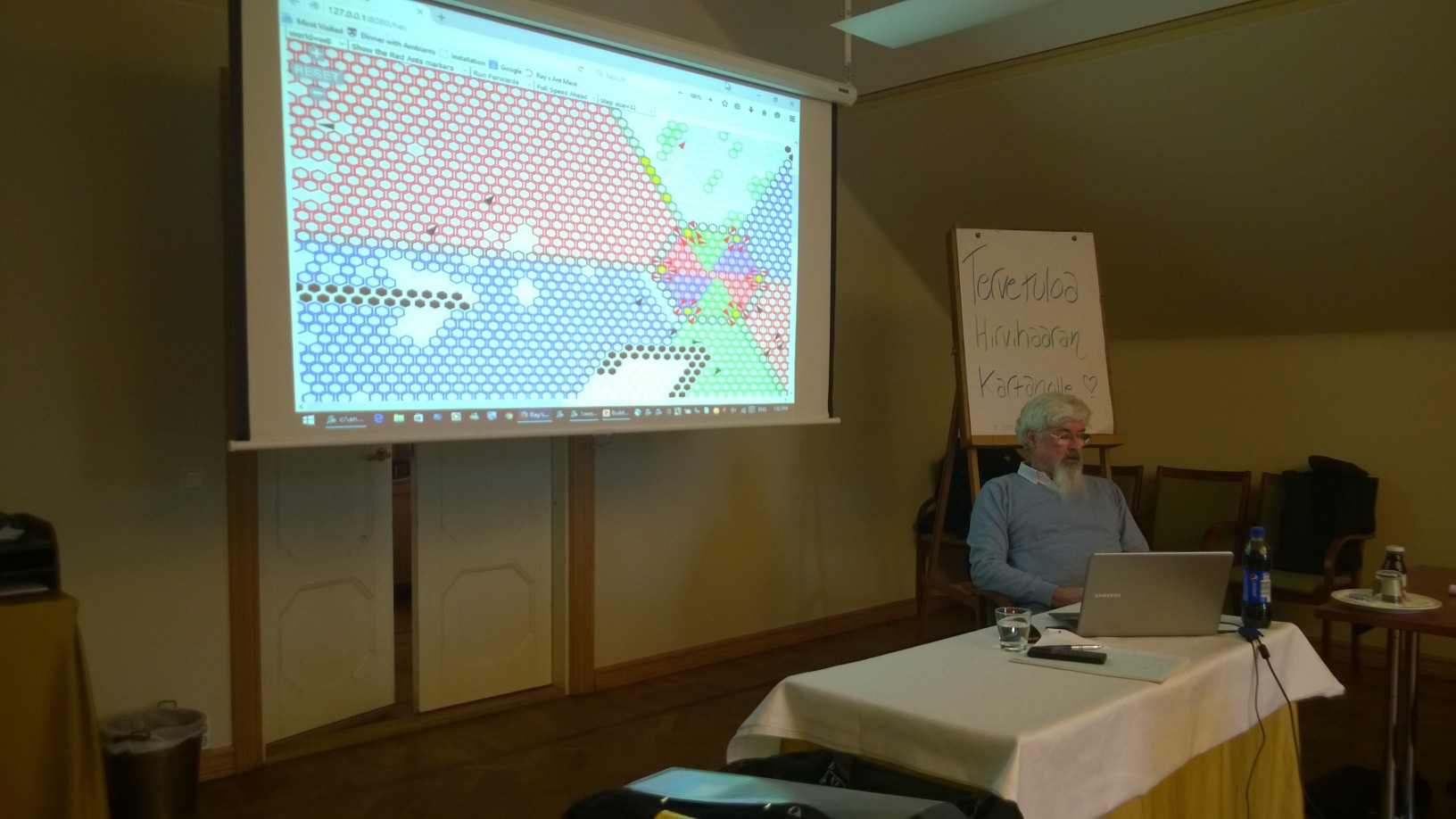
Ants on the left. Ray Cannon on the right
After lunch, Ray Cannon showed us how to “Build a better ant brain”, producing wonderful, coloured, animations with ants crawling all over the big screen, using MiServer 3.0 and a bit of JavaScript – running under Dyalog APL on a Raspberry Pi!
My technical keynote in the morning had included a demo of a very early prototype of a Python interface, which will allow APL users to tap in to Python libraries. I was, therefore, very interested in the next presentation by Esa Pursiheimo from the VTT Technical Research Centre of Finland – which gave us all an introduction to the Python language. There is no question that the Python community has built libraries that could be very useful to APLers (although I cannot say the language itself impressed me much 🙂 ).
The last presentation of the day, titled “Data Driven Documents” (aka “D3”), was also about using libraries written in other programming language to extend APL applications. In this case the language was JavaScript. Jouko Kangasniemi from the Confederation of Finnish Industries (EK) showed how he is generating JavaScript to call the popular D3 Graphics Library and publish charts that are relevant to Economic planners in Finland. A collection of animated charts created using this technology can be found at http://ek.fi/materiaalipankki/tietografiikka/talous/viikon-graafit/.
Since we were in Finland, the afternoon ended with a visit to a traditional “smoke sauna”, before we all scrubbed up for the banquet.

Cheers! From left to right (more or less): Antero Ranne, Gitte Christensen, Esa Lippu, Miika Rämä, Simo Kilponen, Jouko Kangasniemi, Heikki Viitamäki, Esa Pursiheimo, Olli Paavola, Kaarlo Reipas, Göran Koreneff, Morten Kromberg, Kimmo Kekäläinen, Veli-Matti Jantunen, Timo Korpela, Ray Cannon (Missing: Anssi Seppälä)
Friday
The first talk on Friday morning was perhaps the most interesting from my point of view: Antero Ranne of the Ilmarinen Mutual Pension Insurance Company: Parallel showed how he was able to speed up financial simulations by a factor of approximately 3 on his Intel i7-based laptop, using Futures and Isolates in Dyalog version 14.0. It is really good to see that domain experts wield this tool!
After coffee, Gitte presented the work that she had done to put APL on the map as an invited speaker at a recent conference on the history of information technology in the Nordic region. She also reminded us all that we will be celebrating the 50th anniversary of the first running APL system on November 27 (http://silvermapleweb.com/first-cleanspace/). At Dyalog ’16 on October 9th-13th in Glasgow, Scotland, Dyalog will set time aside to celebrate this anniversary in collaboration with the British APL Association. If you have a good story about ground-breaking work done in APL in the early days, please get in touch and discuss how you might contribute to the celebrations!
Once again, I found myself standing between the audience and lunch – fortunately there are enough juicy language features and interfaces coming in versions 15.0 and 16.0 and I did not have anyone walk out before I was done. I even had time to talk about a workspace that we added several years ago, after discovering that several members of the audience were unaware of it: The “loaddata” workspace, which contains functions to read and write Excel Spreadsheets, CSV files, XML and ODBC data sources. If you have not seen it yet, try loading it and take a look.
After another excellent lunch, Anssi Seppälä of Enease Oy wrapped up the formal part of the programme with a talk on an inverted vectorial database implemented in the J programing language, named JD. JD makes it straightforward to manage large timeseries containing records of power usage and the quality of electricity delivered to consumers, perform analyses and generate visualisations of the data.
Several of us continued discussing programming challenges, while drinking (STRONG!!!) Finnish coffee and eating the wonderful cakes that were provided all day by Hirvihaara Manor, before heading back home after another successful FinnAPL Forest Seminar – we look forward to the 2017 edition!
Gitte and I managed to get about 40 hours at home before boarding the next plane, heading for Paris for the first French Dyalog User Meeting in recent history. More about that coming soon!


 While I was away, the Raspberry Pi and the software available for it have come a VERY long way. The speed of a Pi 3 makes it a perfectly usable computer. I am writing this blog entry on the Pi using a standard Chromium browser. APL starts up immediately, using our new graphical IDE. It is quite simply amazing!
While I was away, the Raspberry Pi and the software available for it have come a VERY long way. The speed of a Pi 3 makes it a perfectly usable computer. I am writing this blog entry on the Pi using a standard Chromium browser. APL starts up immediately, using our new graphical IDE. It is quite simply amazing!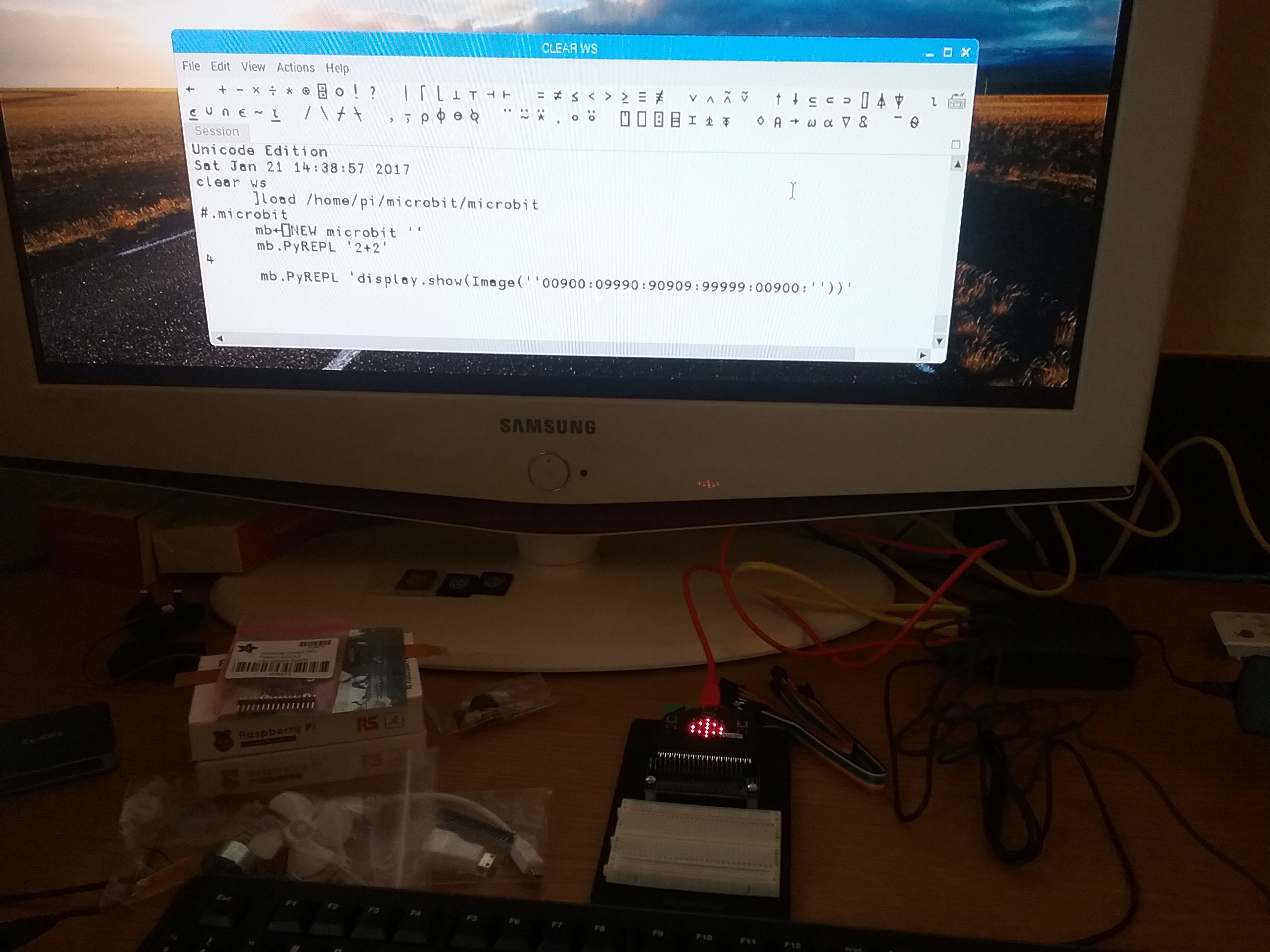
 Follow
Follow